智能时代+人形机器人的战略定位
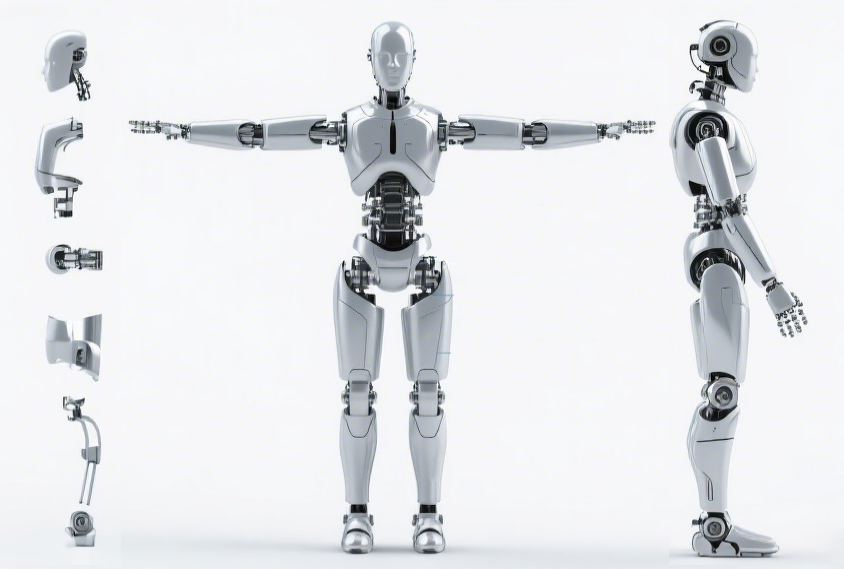
基于在双足仿生模块化设计、运动算法、步态模拟的人形机器人研发。
-
 机器听觉
机器听觉 -
 机器视觉
机器视觉 -
 机器感知
机器感知 -
 运动平衡
运动平衡 -
 机器学习
机器学习 -
 智能关节
智能关节 -
 机器灵巧手
机器灵巧手

基于在双足仿生模块化设计、运动算法、步态模拟的人形机器人研发。
机器听觉 机器视觉 机器感知 运动平衡 机器学习 智能关节 机器灵巧手 人形机器人正以多场景渗透与技术迭代重塑市场格局,其应用已从实验室走向产业化落地,在经济效能提升、社会服务优化及技术创新引领等方面展现出显著价值。





多模态大模型与人机协同技术推动未来新行业突破,将来更在老龄化应对、产业升级等领域创造不可替代的社会价值。

工业制造
人形机器人未来不仅可以替代人机工程差的作业,将员工从危险、重复、价值低的工作中解放出来;也能降低因为人工装配对产品设计的限制,提高设计自由度,满足市场端更加定制化、个性化的需求。
商务办公
人形机器人融合文字、语音、视觉、动作、环境等多模态交互方式进行人机交互,可以代替人类完成一些重复工作,如迎宾接待、自动扫描来访人员、端茶递水、控制智能设备等。
家庭服务
人形机器人未来可以帮助提供简单的家庭服务,如垃圾处理、搬运物体、控制智能设备、操作设备、工具、浇花等,提升家庭生活品质。
科研创新
人形机器人结合视觉、听觉、语音等人工智能技术,可通过具身智能的推理和规划等对其进行训练。拓展、开发人形机器人的更多潜力,推进机器人技术领域的学术发展。
人形机器人采取拟人化的设计理念,模仿人类的身体结构,实现与人类更接近的外观和行为,以便在不同环境中完成命令任务。
制造
主要采用特种钢、永磁材、和PEEK及铝合金材料。外壳采用3D打印技术打印而成,其他精密零部件采用五轴设备加工而成,保证各部件的装配公差,达到工程师的设计要求。
装配
从脚、小腿、大腿、手、手臂,躯干的组装要注意电控引线的位置。身躯、腿和手臂与身躯组装,最后身躯的前后电池板和控制电路板,最后头,安装控制板的时候注意驱赶引线与控制板的连接以及固定方法。 最后再接入电源部分,接电源一定要注意不要接反了。
运动状态
运动状态通常由三个核心部件构成: 加速度计:检测线性加速度(如前后、左右、上下的移动速度变化); 陀螺仪:感知角速度(如身体倾斜、旋转的角速度);磁力计(可选):通过地球磁场辅助确定真实方位。实现每秒数百次的数据采集,通过复杂的数据融合算法,能够提供实时准确的姿态和方位信息。
设计+制造+装配紧密结合,实现人工智能机器人的落地一站式解决方案
 人工智能+硬件设计
人工智能+硬件设计
全尺寸人形机器人的硬件设计,提供完整设计方案与生产资料,可广泛用于科研教学、算法验证及行业应用。
 人工智能+动力学控制软件
人工智能+动力学控制软件
机器人全身动力学控制系统,涵盖传感器、运动控制等核心功能,支持多种机器人本体适配与跨平台部署。
 人工智能+ 运动控制框架
人工智能+ 运动控制框架
运动控制框架是机器人操作系统的核心组成之一,便于开发者统一管理控制任务、驱动控制指令下发。
 人工智能+ 人形机器人数据集
人工智能+ 人形机器人数据集
人形机器人数据集包括人形机器人运动数据集、语音识别数据集、图像识别数据集等提供丰富的数据资源。
 人工智能+ 动作生成大模型
人工智能+ 动作生成大模型
面向人形机器人全身动作生成的动作生成式基础模型,可支持多种具身任务中自然动作生成与实时控制策略解耦。
 人工智能+小尺寸教具型机器人
人工智能+小尺寸教具型机器人
一款拟人的双足小机器人,项目详细提供所需的硬件材料、软件资源可协助开发者搭建和编程自己的机器人。
 人工智能+ 机器视觉大模型
人工智能+ 机器视觉大模型
智基于深度学习的人脸识别算法的人脸检测、人脸识别和海量人脸库搜索比对解决方案,远远超过人眼的识别精度。
 人工智能+ 机器听觉大模型
人工智能+ 机器听觉大模型
机器人听觉系统是机器人实现 “人性化交互” 和 “环境感知” 的核心支撑。
 人工智能+ 机器灵巧手
人工智能+ 机器灵巧手
自由度高的高性能灵巧手,可以模拟接近人手的自然抓取方式,能够实现更丰富、更精细的操作。